Wireless, Passive, Self-Stabilizing Drone
Written by Alice X. on
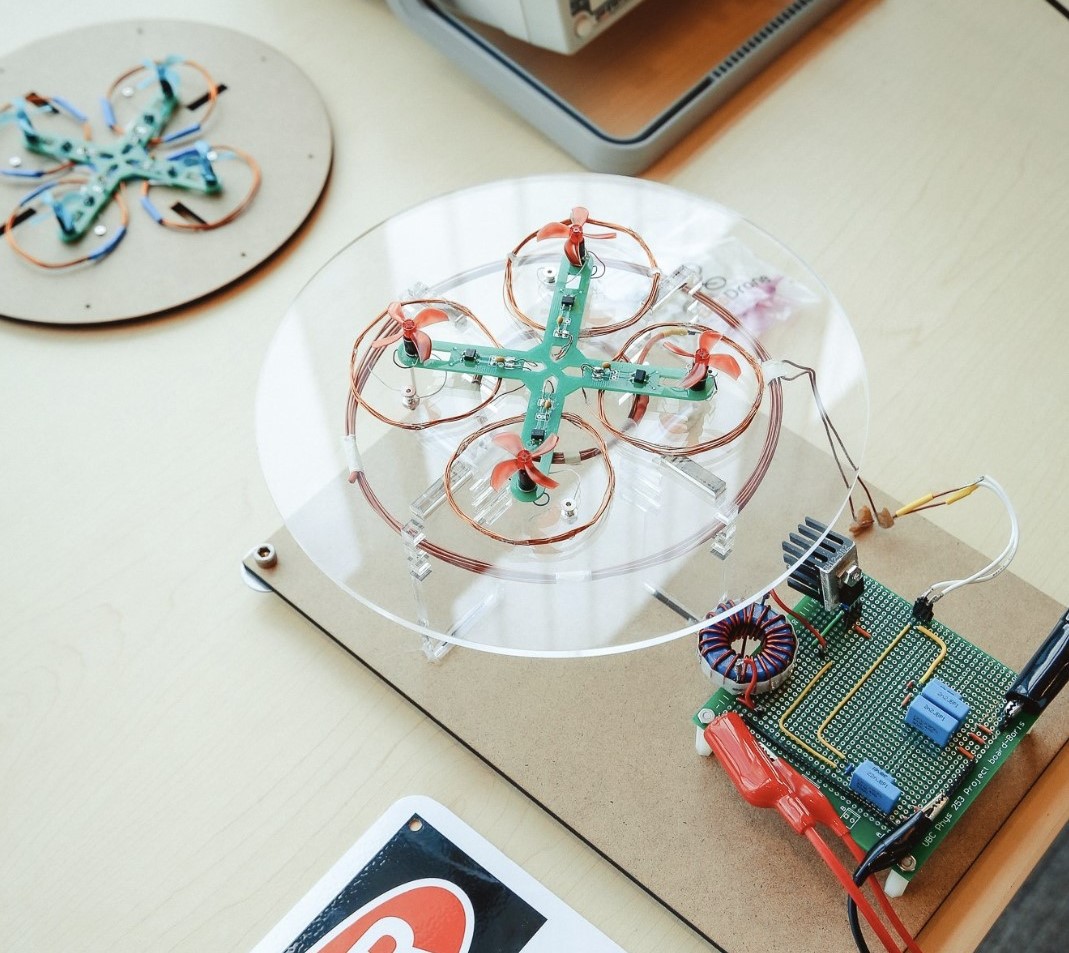
This report details the attempt at developing a passively controlled, wirelessly powered, and self stabilizing quadcopter system. We transfer power using a class E amplifier circuit, allowing the quadcopter to reliably take off and hover within 20cm. Self stabilization under the constraint of passive control was only accomplished with yaw limiting tethers.