All
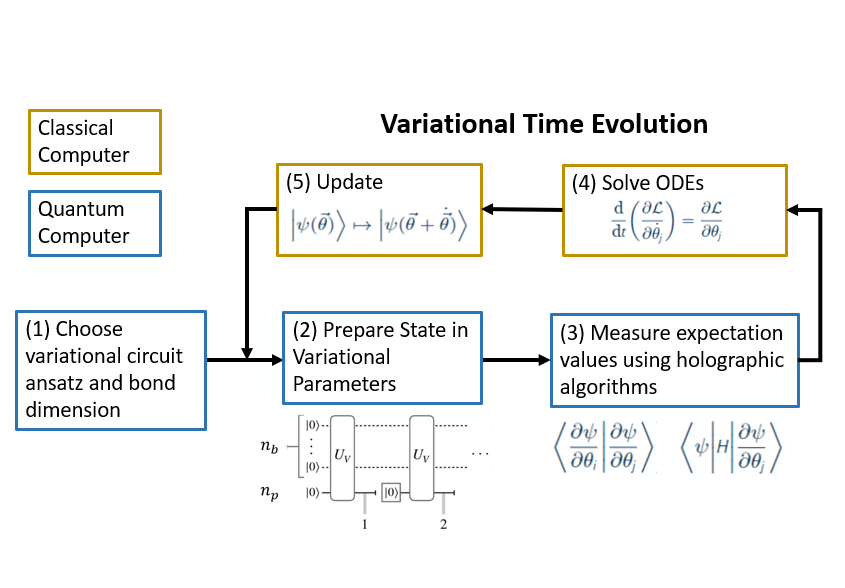
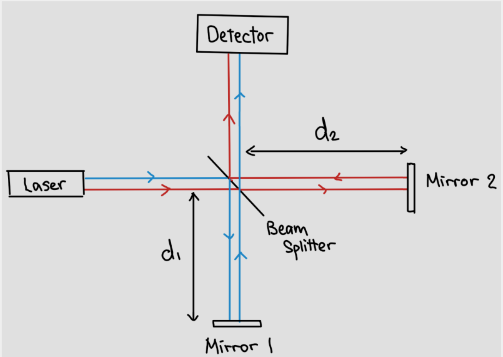
Physics
Robotics
Electronics
Software
People