Integration & Programming
Going from a computer model of the robot to a final product takes much longer than imagined.
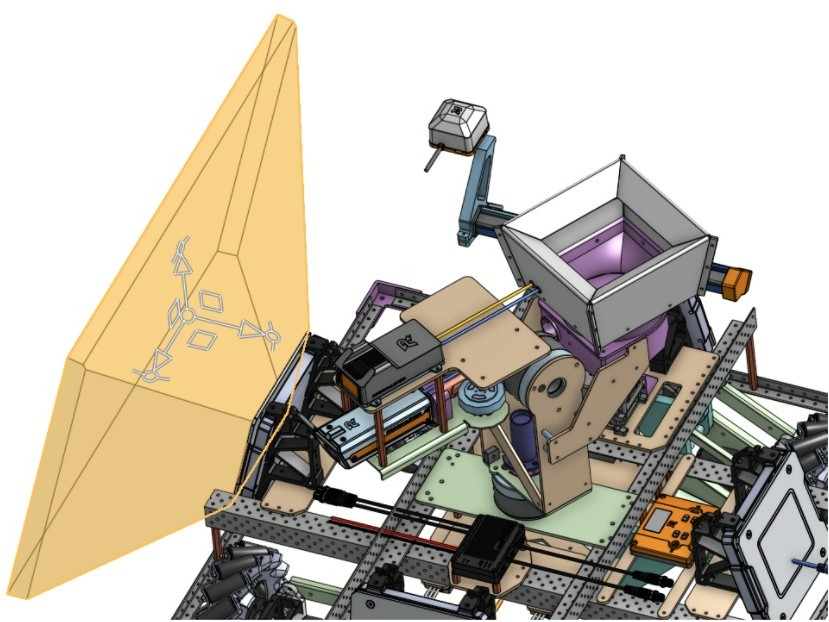
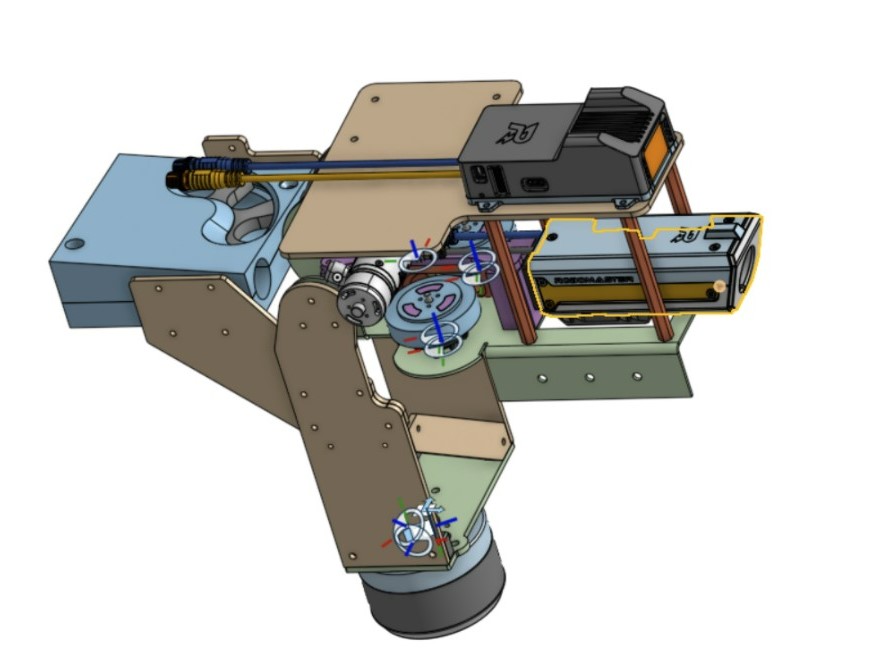
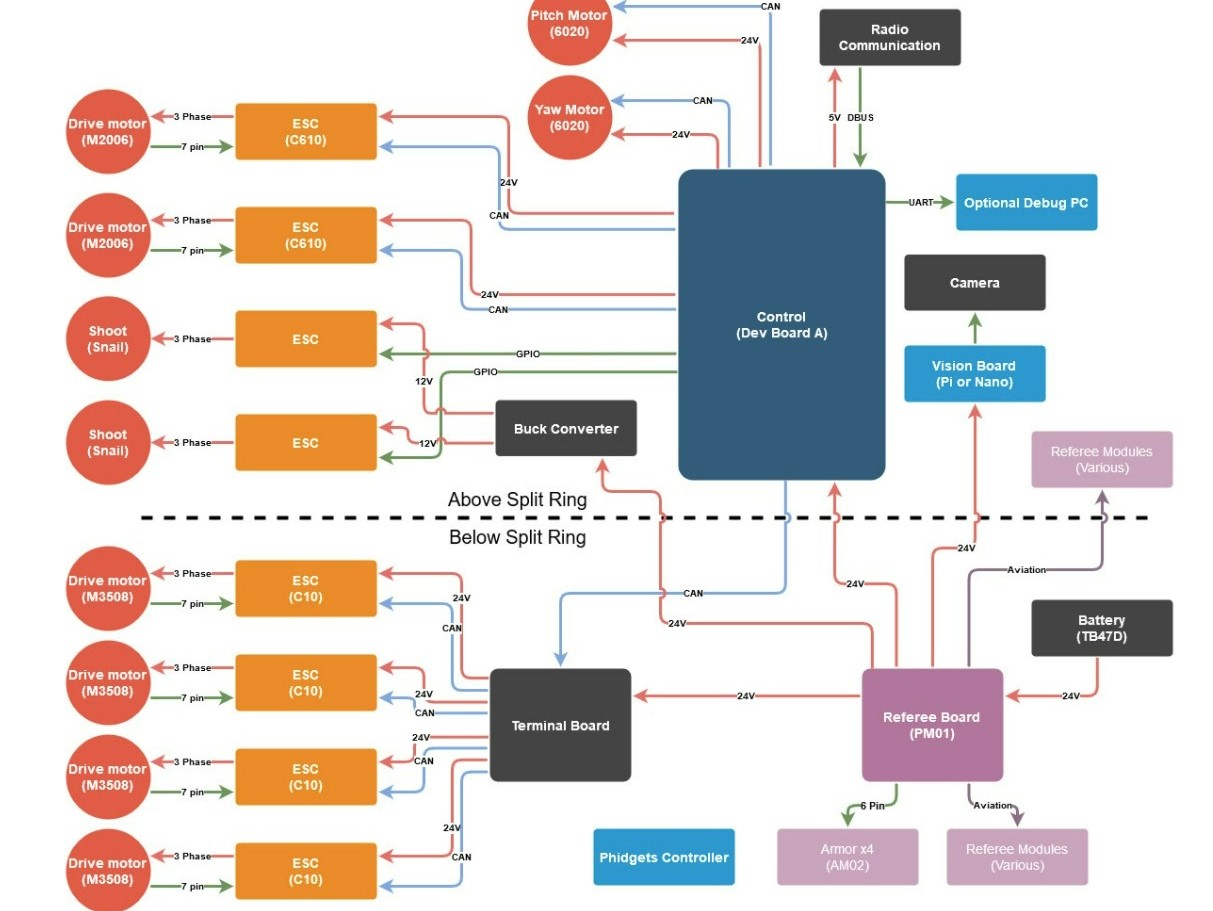
As with this launcher, integrating it with the rest of the robot is one of the major challenges for the robot design. The robot chassis spins 360 degrees,
hence we have to route all cables through a slip ring, and use quarternion coordinates for calculating the position of the launcher. The firmware also integrated
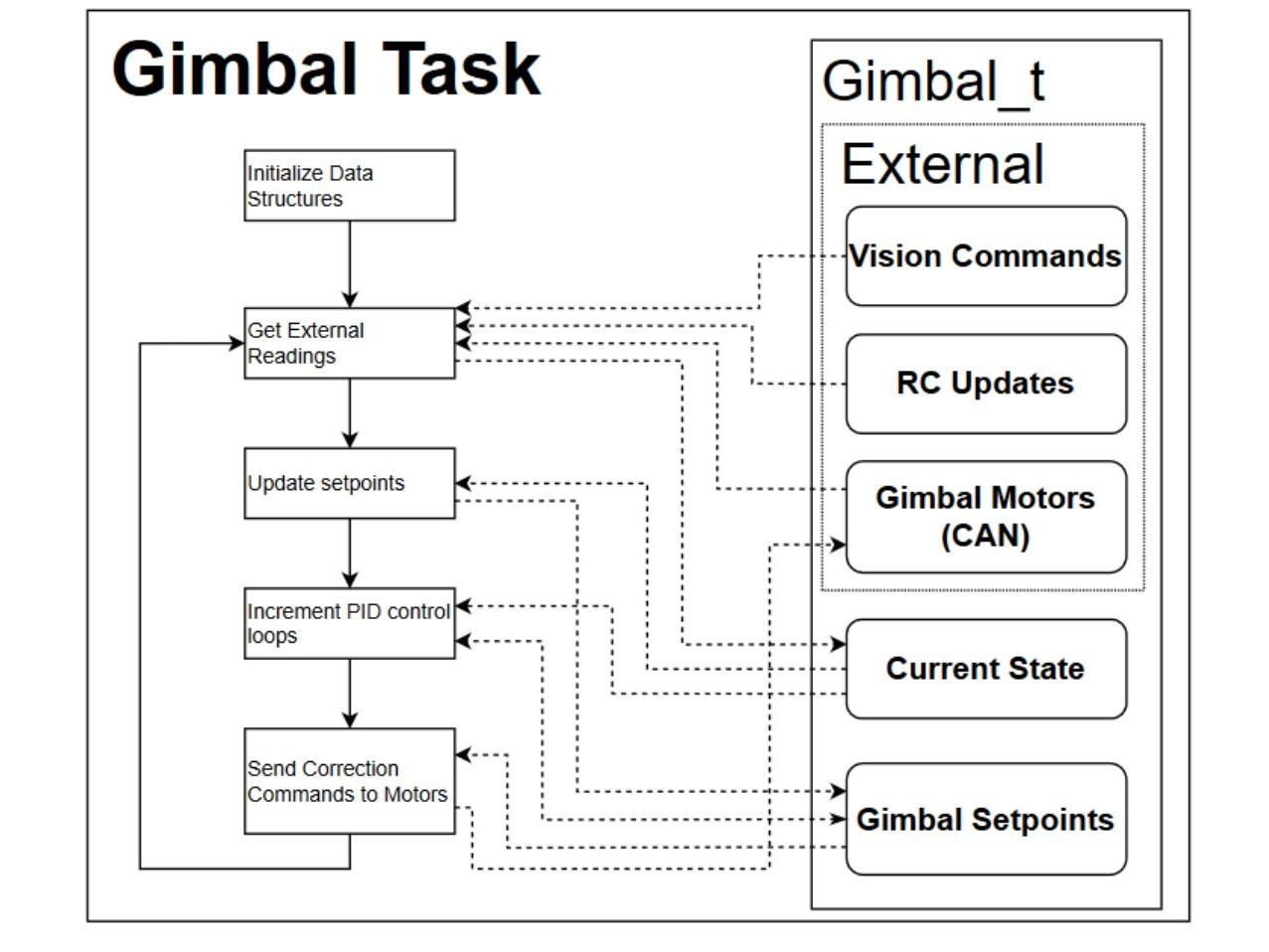
CAN communication and RTOS, making it robust and fast. Further, we then integrate the firmware with the computer vision system, allowing us to detect the position
of opponent robots and respond accordingly.